|
Bike-X
0.8
|
|
Bike-X
0.8
|
#include "OVR_SensorImpl.h"#include "OVR_Sensor2Impl.h"#include "OVR_SensorImpl_Common.h"#include "OVR_JSON.h"#include "OVR_Profile.h"#include "Kernel/OVR_Alg.h"#include <time.h>#include "Kernel/OVR_Timer.h"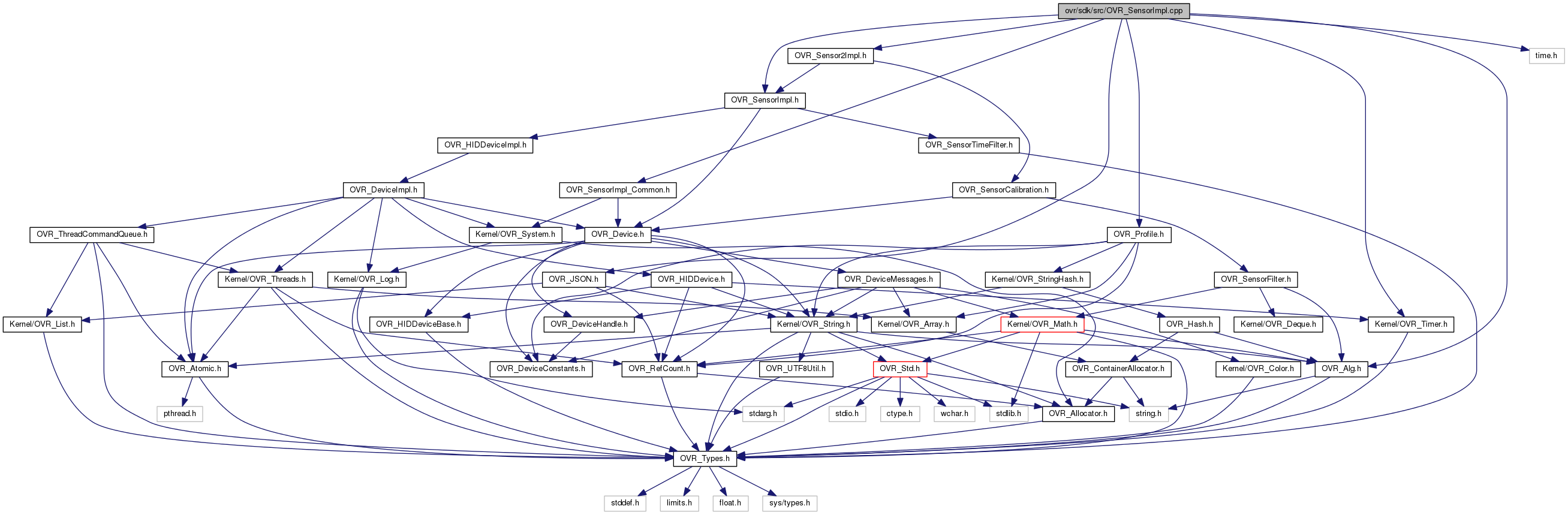
Go to the source code of this file.
Data Structures | |
| struct | OVR::TrackerSensors |
| struct | OVR::TrackerMessage |
Namespaces | |
| OVR | |
Enumerations | |
| enum | { OVR::Sensor_VendorId = Oculus_VendorId, OVR::Sensor_Tracker_ProductId = Device_Tracker_ProductId, OVR::Sensor_Tracker2_ProductId = Device_Tracker2_ProductId, OVR::Sensor_KTracker_ProductId = Device_KTracker_ProductId, OVR::Sensor_BootLoader = 0x1001, OVR::Sensor_DefaultReportRate = 500, OVR::Sensor_MaxReportRate = 1000 } |
| enum | OVR::TrackerMessageType { OVR::TrackerMessage_None = 0, OVR::TrackerMessage_Sensors = 1, OVR::TrackerMessage_Unknown = 0x100, OVR::TrackerMessage_SizeError = 0x101 } |
Functions | |
| Vector3f | OVR::AccelFromBodyFrameUpdate (const TrackerSensors &update, UByte sampleNumber, bool convertHMDToSensor=false) |
| Vector3f | OVR::MagFromBodyFrameUpdate (const TrackerSensors &update, Matrix4f magCalibration, bool convertHMDToSensor=false) |
| Vector3f | OVR::EulerFromBodyFrameUpdate (const TrackerSensors &update, UByte sampleNumber, bool convertHMDToSensor=false) |
Variables | |
| const int | OVR::MAX_DEVICE_PROFILE_MAJOR_VERSION = 1 |
| struct OVR::TrackerMessage |
Definition at line 112 of file OVR_SensorImpl.cpp.
| Data Fields | ||
|---|---|---|
| TrackerSensors | Sensors | |
| TrackerMessageType | Type | |
 1.8.6
1.8.6 
